All Projects
ImPlot3D
December 2024
ImPlot3D extends Dear ImGui by offering accessible, high-performance 3D plotting capabilities. Drawing inspiration from ImPlot, it offers a user-friendly API for developers familiar with ImPlot. ImPlot3D is specifically crafted for generating 3D plots featuring customizable markers, lines, surfaces, and meshes, making it a perfect choice for applications that need a visual representation of 3D data.

Groningen Apartment Hunter Bot
July 2023
This Python bot helps you find your perfect apartment in Groningen. It continuously checks various apartment rental websites, looking for new listings that match your preferences. Whenever it finds a potential match, the bot sends a notification to your Telegram account. (Yes I did find the place I'm living today using this bot 😜)
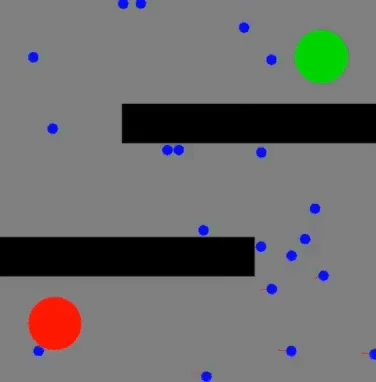
Object Transport with Swarm
September 2022
This project extends Chen (2015) by enabling a swarm of miniature vision-based robots to transport objects around obstacles using sub-goal formation. The approach remains decentralized, communication-free, and vision-driven, allowing efficient object transport in complex environments.
Underground Scanner
September 2021
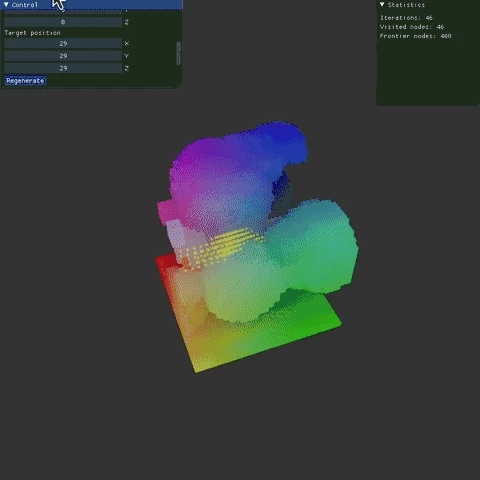
Underground Scanner is a visualization tool for search algorithms, developed as an assignment for SCC. The project simulates a drone navigating an underground mine using A* and BFS to find the shortest path on a 3D grid. Given a mapped environment, the drone autonomously searches for an optimal route to its target.



CPU Simulator
March 2020
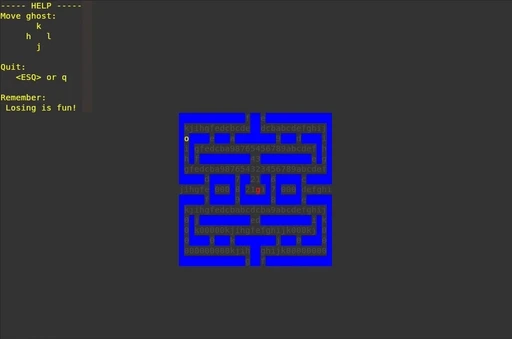
I designed a custom assembly language along with an assembler to convert the assembly code into binary. Additionally, I developed a CPU simulator capable of executing the binary instructions, with the output displayed on a curses-based screen. To demonstrate the system, I created two games specifically for this CPU.






Warthog NavAlg
July 2019
This project focuses on using object-oriented programming to simulate pathfinding algorithms for soccer robots. A Qt-based application was developed to visualize the generated paths effectively. Currently, the implemented algorithms include the Potential Field method and A*, combined with a Quad-Tree structure.

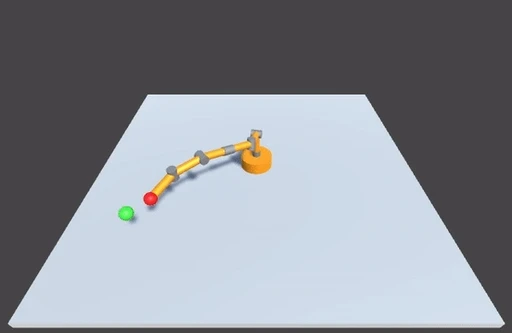
Obstacle Avoidance Genetic Alg
July 2019
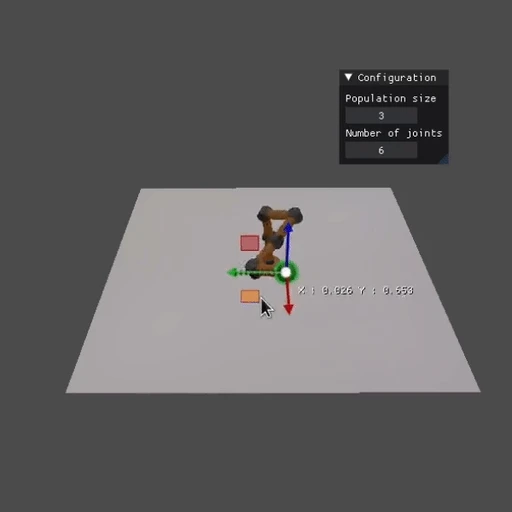
The goal of this project was to optimize the configuration of an evolutionary system for autonomous robots equipped with three sensors. A genetic algorithm was employed to determine the optimal sensor placement and enhance obstacle avoidance capabilities. To achieve this, a secondary evolutionary system was used to fine-tune the parameters of the primary system, ensuring improved adaptability and performance.


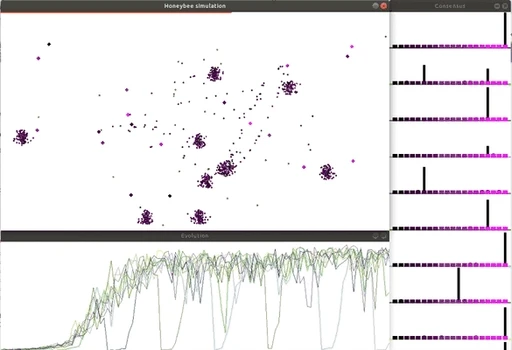
Evolutive System Analyzer
May 2019
This project aims to create an interface to monitor the evolution of robots within a simulated environment, being possible to choose different evolutionary techniques and different evolutionary pressures and evaluate the result with graphs. A MATLAB app was created to analyze the data at real time.

Soccer Robot
December 2017
I developed this soccer robot in high school and it was my first complex robotics project (first time developing PCBs, 3D models, simulations,, and using Arduino). The robot was first developed in V-REP to simulate soccer games and evaluate the control, perception, and planning algorithms. After that, the PCB and 3D printed parts were developed and tested.
